
Automatisiertes Fahren schneller auf die Straße bringen
Start des Projekts TranSphere am IFM

Assistiertes und automatisiertes Fahren, Elektromobilität und die intelligente Vernetzung sind die Megatrends in der Fahrzeugindustrie, von denen ein großer Wandel zu erwarten ist. Im neu gegründeten Institut für Fahrerassistenz und vernetzte Mobilität – gefördert vom Freistaat Bayern – bündeln sich die Forschungsbereiche Fahrerassistenz und vernetzte Mobilität. Die Schwerpunkte des Instituts liegen in den Bereichen:
Das IFM hat einen unmittelbaren Zugang zu einem benachbarten Prüf- und Testgelände und bietet damit die Möglichkeit zur Umsetzung einer Vielzahl von Projekten rund um die Themen Fahrerassistenz, automatisiertes Fahren und vernetzte Mobilität. Dabei kooperiert das Institut mit anderen anwendungsorientierten Partnern wie zum Beispiel der Hochschule für angewandte Wissenschaften München, aber auch mit grundlagenorientierten Forschungspartnern wie der Technischen Universität München.
Gleichzeitig treibt das Institut den Ausbau der Kooperation mit Industrieunternehmen voran. In einem derart innovativen Arbeitsfeld haben diese einen hohen Forschungs- und Entwicklungsbedarf und sind sowohl auf junge gut ausgebildete Mitarbeiterinnen und Mitarbeiter als auch auf Forschungskapazität und Know‐how angewiesen.
Forschungs- und Entwicklungsschwerpunkte
Das IFM in Zahlen und Fakten
Prof. Bernhard Schick
Leitung
Tel. 08331-9893-099
bernhard.schick(at)hs-kempten.de
Prof. Dr. Rolf Jung
Leitung
Tel. 08331-9893-100
rolf.jung(at)hs-kempten.de
Standort
Junkersstraße 1A, 87734 Benningen
Die Veröffentlichungen des IFM finden Sie hier.
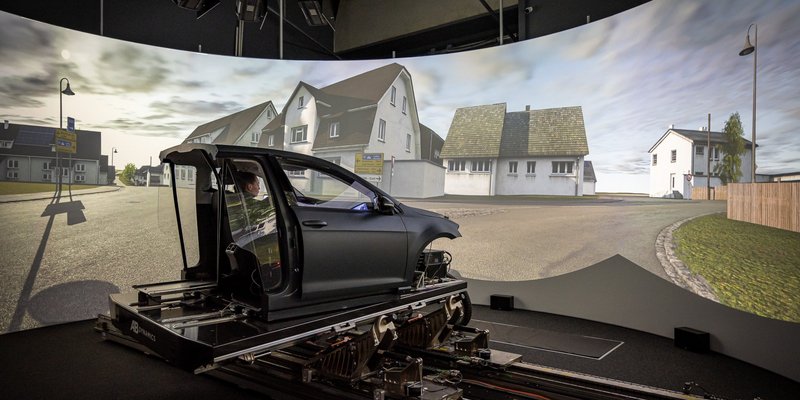
Ende 2020 bezog das Institut den Neubau in direkter Nachbarschaft zum FAKT Motion Prüf- und Testgelände. Der Neubau ist mit Fahrzeugwerkstätten, Laboren und Büros ausgestattet. Er bietet ausreichendend Platz für Prüfstände und auch den advanced Vehicle Driving Simulator des Adrive Living Labs.
Der neue Standort bietet mit seiner Nähe zum Prüf- und Testgelände und den damit verbundenen Nutzungsmöglichkeiten des Geländes große Vorteile für das Institut. In unmittelbarer Nähe zum Allgäu Airport und weiteren Unternehmen aus der Automotive Branche liegt das IFM im Herzen eines florierenden Wirtschaftsstandorts im Unterallgäu.






Im Forschungsbereich Fahrerassistenz konzentriert sich das Team des IFM besonders auf folgende Themen:
Zum einen arbeiten wir an der Weiterentwicklung im Bereich autonomes Fahren mithilfe der Virtualisierung von Tests. Damit können nicht nur die Tests selbst, sondern auch die Komponenten Umwelt, Fahrer und Fahrzeug abstrahiert werden. Zudem ist die Virtualisierung von Tests nicht nur kostengünstiger, sondern bietet aufgrund intelligenter Bewertungs-, Validierungs- und Absicherungsmethoden eine höhere Testeffizienz.
Durch spezielle Probandenstudien wird dabei auch der Mensch in den Vordergrund der Forschung gestellt.
Durch die zunehmende Automatisierung der Fahrzeuge werden Validierungs- und Absicherungsmaßnahmen sowie funktionale Sicherheit und Cybersicherheit immer wichtiger. Durch die Weiterentwicklung der Systeme in diesem Bereich versuchen wir die Sicherheit der Verkehrsteilnehmer weiterhin zu gewährleisten – besonders aufgrund der geringeren Eingriffsmöglichkeiten des Fahrers.
Bei der Entwicklung von Fahrassistenzsystemen und automatisiertem Fahren haben Sensoren und Algorithmen zur Umfelderkennung besondere Bedeutung. Diese haben intelligente Fahrmanöver durchzuführen und eine sichere Bewertung der aktuellen Verkehrslage zu leisten – besonders in urbanen Gegenden mit komplexen Verkehrssituationen und -variablen.
Die Freigabe von klassischen Fahrfunktionen, wie zum Beispiel für den Antrieb oder für die Fahrzeugdynamik, basiert auf aussagekräftigen Tests dieser Fahrzeugfunktionen in realistischen Anwendungsfällen. Die bisherige Strategie für die klassischen Fahrzeugtests reicht allerdings nicht für die Validierung von automatisierten Fahrfunktionen wie Fahrerassistenz, hochautomatisierten Fahrfunktionen und autonomes Fahren aus. Der Testumfang sprengt jede ökonomische Verhältnismäßigkeit. Eine Methode diesen Testaufwand signifikant zu reduzieren ist die Virtualisierung dieser Tests. Dazu müssen nicht nur die Tests, sondern auch die drei systembeschreibenden Komponenten für eine Fahrzeugfunktion, nämlich die Komponenten Umwelt, Fahrer und Fahrzeug abstrahiert werden. Die Komponente Fahrer rückt dabei mit zunehmendem Automatisierungsgrad immer mehr in den Hintergrund und wird durch Sensoren, die sich an der Schnittstelle zwischen Umwelt und Fahrer befinden, schrittweise ersetzt.
Die Tests für die Absicherung von Fahrerassistenzsystemen und automatisiertem Fahren werden zunehmend aufwendiger als die Entwicklung dieser Systeme selbst. Als Ausweg aus diesem Dilemma bieten sich Virtualisierung, Frontloading durch intelligente Bewertungs-, Validierungs- und Absicherungsmethoden sowie eine höhere Testeffizienz an. Die Herausforderung bei der Entwicklung von Fahrerassistenzsystemen und automatisierten Fahrfunktionen (ADAS/AD) besteht für Fahrzeughersteller außerdem in der Schwierigkeit, sich untereinander zu differenzieren. Die markenspezifischen Eigenschaften und die Marktpositionierung der Fahrzeughersteller werden im Rahmen der Funktionsentwicklung bisher kaum berücksichtigt.
Im Zuge der menschenzentrierten Forschung führte das Adrive Living Lab der Hochschule Kempten verschiedenen Probandenstudien durch. Dazu gehörten sowohl psychologische Befragungen als auch Messungen am Fahrzeug, im Umfeld und am Probanden selbst. Zusätzlich erarbeitete das Adrive Living Lab ein Simulatorkonzept und überführte es in einen Funktionsdemonstrator. Dies ermöglicht eine menschenzentrierte Forschung in komplexen und kritischen Situationen.
Die Validierungs- und Absicherungsmaßnahmen müssen hinsichtlich funktionaler Sicherheit und Cybersecurity begleitet und weiterentwickelt werden, da bei höheren Automatisierungsgraden der Fahrer immer weniger Eingriffsmöglichkeiten besitzt. Fehler bei der Mensch-Maschine-Schnittstelle rücken damit in den Mittelpunkt. Bei vollständig autonomem Betrieb sind die Absicherungsmaßnahmen für alle Szenarien abzubilden. Durch die Vielzahl an kombinierten Szenarien ist es notwendig, eine Methode zu finden, diese Anzahl zu reduzieren, ohne die Sicherheit der Verkehrsteilnehmer einzuschränken. Neben unzulänglicher Spezifikation, zufälligen Bauteilausfällen oder Softwarefehlern können auch bei bestimmungsgemäßem Gebrauch von Sensoren und Steuerungen fehlerhafte Verhaltensweisen bei Fahrerassistenzsystemen auftreten. Diese können zum Beispiel als „Geisterbilder“ auftreten.
Eine verlässliche, robuste Umfelderfassung ist eine der Hauptvoraussetzungen für die Entwicklung von Fahrerassistenzsystemen und hochautomatisiertem Fahren. Intelligente und angemessene Fahrmanöver und Gesamtszenarien in allen Bereichen – insbesondere in urbanen Gegenden – auszuführen, heißt die präzise und sichere Bewertung der aktuellen Verkehrslage leisten zu können. Wichtig dabei ist, die Erkennung komplexer Situationen mit vielen Variablen zu gewährleisten. Dazu gehören neben der Straße und Verkehrsinfrastruktur wie Ampeln und Verkehrsschilder auch Baustellen, Straßenbegrenzungen, fahrende oder stehende Fahrzeuge, Fußgänger, Fahrradfahrer und Tieren inklusive deren vorhersehbaren und überraschenden Handlungen. Dafür müssen alle modernen Umfeldsensorarten als Referenzsensoren mit hoher Genauigkeit und in Serienmenge vorliegen.
Im Forschungsbereich Vernetzte Mobilität dreht sich alles um folgende Themen:
Regelkomponenten der Fahrerassistenzsysteme greifen aktiv in die Fahrdynamik des Fahrzeugs ein und stellen somit höchste Anforderungen an die Funktionssicherheit und Zuverlässigkeit der Einzelsysteme und deren Wechselbeziehungen im Systemverbund. Eine besondere Herausforderung ist demnach die Integration der vernetzen Fahrassistenzfunktionen in den Gesamtfahrzeugverbund.
Zudem fällt die Satellitenortung & Satellitennavigation sowie die Car2X Kommunikation in diesen Bereich. Diese unterstützen mit ihren kooperativen Fähigkeiten, wenn es zur Verkehrsflusssteuerung kommt, und sind eine wertvolle Ergänzung der autonomen Fahrzeugfähigkeit.
Auch die von der Hochschule entwickelte IKT-Infrastruktur zwischen Fahrzeugen, Ladeinfrastruktur und Routenplanung bietet eine Basis für den nutzerfreundlichen und wirtschaftlichen Betrieb von Elektrofahrzeugen. Hierzu erweitern wir die bestehende Datenbank fortlaufend und ergänzen sie um Schnittstellen. Ziel ist letztendlich, die Datenbank zu einer plattformunabhängigen Lösung auszubauen.
Regelkomponenten der Fahrerassistenzsysteme greifen aktiv in die Fahrdynamik des Fahrzeugs ein und stellen höchste Anforderungen an die Funktionssicherheit und Zuverlässigkeit der Einzelsysteme und deren Wechselbeziehungen im Systemverbund. Sie interagieren stets mit Steuergeräten anderer Regelsysteme. Dies setzt enorme Entwicklungsanstrengungen voraus, insbesondere was die „Integration der vernetzten Fahrerassistenz-Funktionen in den Gesamtfahrzeugverbund“ betrifft.
Satellitenortung und -navigation sowie graphische Informationssysteme (GIS) auf Basis digitaler Karten sind lange etablierte „State-of-the-Art" Technologien. Mit Car2X-Kommunikation werden die Fahrzeuge zukünftig über kooperative Fähigkeiten verfügen, die zur automatisierten und optimierten Verkehrsflusssteuerung zum Beispiel an Ampelkreuzungen und auf Autobahnen unabdingbar sind. Auch das sogenannte autonome Fahren wird in der Vollendung erst durch die Ergänzung der autonomen Fahrzeugfähigkeiten durch kooperative Fähigkeiten möglich werden.
Die in den vergangenen Jahren an der Hochschule entwickelte IKT-Infrastruktur zwischen Fahrzeugen, Ladeinfrastruktur, Energiebereitstellung und Routenplanung ist die Basis für einen nutzerfreundlichen, zuverlässigen und wirtschaftlichen Betrieb elektrischer Fahrzeuge. Sie dient als Grundlage für die Fragestellungen einer vernetzten Mobilität. Wir streben dabei eine vollständige Interoperabilität zwischen den Systemen an, die bidirektionalen Datenaustausch ermöglicht, eine hohe Robustheit bietet und zu vertretbar wirtschaftlichen Konditionen realisiert werden kann. Hierzu erweitern wir die bestehende Datenbank und ergänzen die Schnittstellen. Wir streben an, die Daten skalierbar darstellbar zu machen und die Datenbank zu einer plattformunabhängigen Lösung auszubauen, die größere Datenmengen verarbeiten kann. Diese Daten aus dem Betrieb dienen wiederum als Grundlage für Fragestellungen aus dem Forschungsbereich Funktionstüchtigkeit und Zuverlässigkeit.




Start des Projekts TranSphere am IFM

Studie der Universität Duisburg-Essen und der Hochschule Kempten am IFM

Vom 9. bis 10. Oktober fand die Konferenz Innovative Ideas in Science IIS2024 an unserer Erasmus-Partneruniversität in Baia Mare, Rumänien, statt.…




Technologietransfer zum Nutzen für Menschen, Wirtschaft und Gesellschaft
Die Zukunft der Mobilität wird automatisierter und digitalisierter. Die Automobilbranche muss sich im technologischen Wandel und im internationalen Innovationswettbewerb behaupten – und das möglichst schnell und effizient. Forschung und Technologie zum Erleben und Anfassen.
Das neue Forum „Explore-to-Innovate“ bestehend aus zwei Tagen, dem Science Talk, Evening Rollout und dem Track Day, verknüpft auf einzigartige Weise Fachvorträge, Technologieausstellung und Live-Demos im Labor und auf Teststrecken. Gemeinsam mit unseren Partnern schaffen wir damit eine Community, um neueste Forschungsergebnisse auf den Weg zu bringen – Technologietransfer zum Nutzen für Menschen, Wirtschaft und Gesellschaft.
Im Institut für Fahrerassistenz und vernetzte Mobilität bündeln sich die Kompetenzen verschiedener Forschungsgebiete unter dem Motto: interdisziplinäre Forschung im engen Schulterschluss mit der Automobilindustrie.
Das Institut für Fahrerassistenz und vernetzte Mobilität der Hochschule Kempten lädt zusammmen mit den Technologiepartnern am 19.+ 20. Juni 2024 ins IFM nach Benningen (Innovationspark Allgäu Airport) ein.
Unsere Gäste erwarten spannende Vorträge, Einblicke in die Forschung und ein unterhaltsamer Abend – ein Tag voller Erlebnisse und Innovationen.
Die gesamte Veranstaltung vom letzten Jahr können Sie auf unserem Youtube-Kanal nochmals ansehen: Explore-to-Innovate 2023 | Deutsch
































Zur Verwendung des Chatbots ist eine Zustimmung zur Verarbeitung der anfallenden Daten durch unseren externen Dienstleister erforderlich.
Dabei werden Cookies geladen sowie verschiedene Daten für Statistiken und Analysen dauerhaft anonymisiert gespeichert und ausgewertet (Details siehe Chatbot Datenschutzerklärung).
Die datenschutzrechtlichen Einstellungen können jederzeit in den Datenschutzeinstellungen geändert werden.